前言
本篇将详细的带大家了解一下视图矩阵。
视图矩阵本质
我们之前说过,视图矩阵可以让我们从另一个角度观察物体。
那我们能不能在没有视图矩阵的情况下,看见物体的另一个角度呢?
答案肯定是可以,我们自己用模型矩阵把物体转一下就可以了。
因此,视图矩阵的本质是对物体的旋转变换。
而物体变换的本质则是对物体顶点的位移。
所以,接下来咱们就通过模型矩阵的旋转变换来理解视图矩阵。
1.我在webgl 画一个立方体
2.默认我们只能看见这个立方体的正面。
3.我想看看立方体右侧长啥样。
我们要实现第3步,可以构建一个矩阵,让它对立方体的顶点进行变换。
这个矩阵的构建思路有两条:
构建一个从左前方看物体的视图矩阵
构建一个让立方体向左旋转的模型矩阵
上面的两个矩阵最终的因子形态都是一样的。
接下来我就按照上面的两个思路建立两个矩阵,然后对这两个矩阵的因子做一下对比,若它们都是一样的,那大家也就可以理解视图矩阵的本质了。
构建视图矩阵
首先咱们先准备一个场景。
我们通过俯视图来解释这个场景。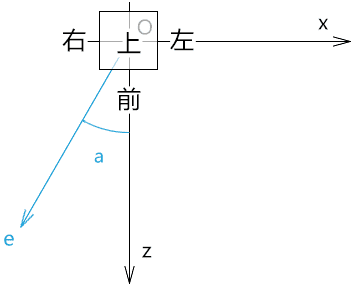
已知:
- 视点为e
- 目标点t=原点O
- 上方向u(0,1,0)
求:视点e所见的物体的形态
接下来我们先以模型矩阵求解。
构建模型矩阵
基于视线和z轴的夹角,将立方体向左旋转a即可。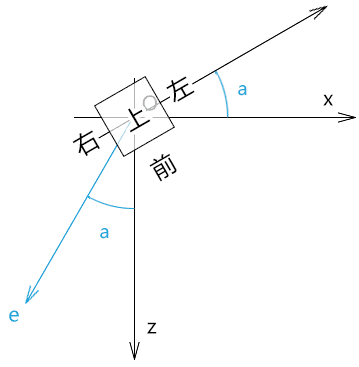
想象一下,现在我们站在z轴上看见的立方体的形态,就相当于我们之前视点在e上算看见的立方体的形态。
1.建立视线,目标点和上方向
1 | e=(-0.5, 0, 1) |
2.用目标点减视点得视线c
1 | c=e-t |
3.将c 归一化后,可得角a 的正弦值和余弦值
1 | |c|=sqrt(c.x*c.x+c.y*c.y+c.z*c.z) |
4.上面的cos和sin 便可以作为立方体向左旋转的模型矩阵(列主序)的旋转因子
1 | const modelMatrix = [ |
接下来将模型矩阵传给顶点着色器,让其与顶点相乘即可,其原理我们在说模型矩阵的时候都说过,我就不再多说了。
效果如下: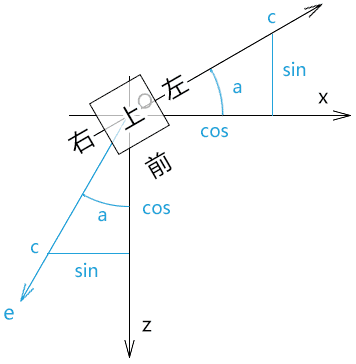
1 | const e = new Vector3(-0.5, 0, 1) |
构建视图矩阵
我们要构建视图矩阵,就得构建新的坐标系[O;a,b,c]。
1.新坐标系的z 轴,视线c 的归一化。
1 | c=(sin,0,cos) |
2.新坐标系的x轴,可视之为上方向u(0,1,0)和视线c(sin,1,cos)构成的平面的垂线的归一化a
a的坐标值可由垂直向量的叉乘定理得出:
1 | a=u^c |
因为:向量a是由两个相互垂直的归一化向量的叉乘得出
所以:
1 | |a|=|u|*|c|*sin90° |
所以:向量a 无需再做归一化处理
3.新坐标系的y轴,可视之为视线c(sin,0,cos)和向量a(cos,0,-sin)构成的平面的垂线的归一化b
1 | b=c^a |
向量b无需归一,原理同上
4.综上所述,新坐标系的三个基向量分别为:
1 | a(cos,0,-sin) |
5.根据三个基向量构建视图矩阵(列主序)
1 | const viewMatrix = [ |
将视图矩阵viewMatrix和模型矩阵modelMatrix对比一下,会发现,它们是一样的。
所以:视图矩阵的本质是对物体的旋转变换。
代码实现:
1 | const e = new Vector3(-0.5, 0, 1) |
结语
本篇文章就到这里了,更多内容敬请期待,债见~
.jpg)

