前言 本篇文章继续跟着李伟老师学习WebGL,本篇主要来学习透视投影矩阵
基础知识 在学习透视投影矩阵之前,需要补充回顾一些基础知识
齐次坐标系 在齐次坐标系中以下等式是成立的:
1 2 (x,y,z,1)=(x,y,z,1)*k=(kx,ky,kz,k) k≠0 (x,y,z,1)=(x,y,z,1)*z=(zx,zy,z²,z) z≠0
比如:
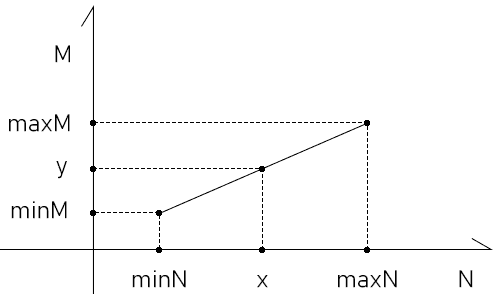
线性补间运算 之前我们说过斜截式y=kx+b,它就是线性补间运算的公式。
除了斜截式,两种数据间的线性映射关系还可以用其它方法来表示。
已知:[minN,maxN]
2.M类型的数据极值是[minM,maxM]
3.x属于N
4.将x映射到M的中的值为y
则x,y 的关系可以用两个等式表示:
比例式: 1 (x-minN)/(maxN-minN)=(y-minM)/(maxM-minM)
斜截式: 1 2 3 k=(maxM-minM)/(maxN-minN) b=minM-minN*k y=kx+b
通过线性插值的特性,我们可以知道:
[minN,maxN]中的每个点都与[minM,maxM]中的唯一点相对应,由一个x便可以求出唯一一个y。
基础知识咱们就先说到这,接下来咱们认识一下透视投影矩阵。
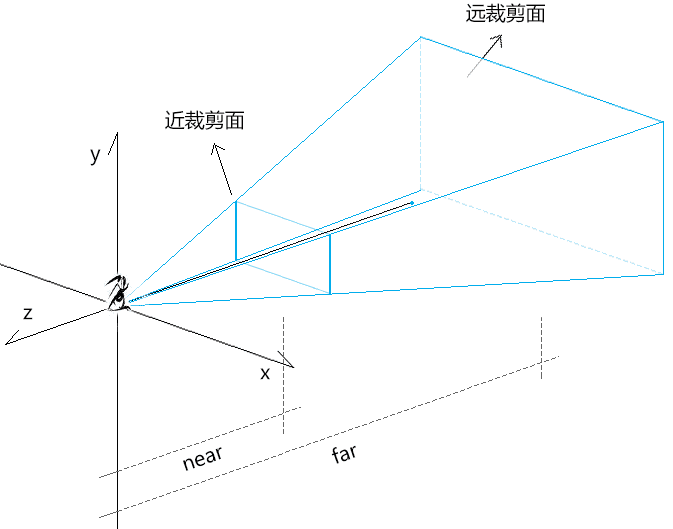
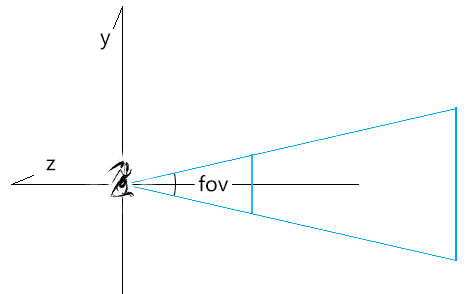
认识透视投影矩阵 透视投影矩阵 perspective projection:将世界坐标系中的一块四棱台形的区域投射到裁剪空间中,不同深度的物体具备近大远小的透视规则。
透视相机的建立需要以下已知条件:
fov:摄像机视锥体垂直视野角度
aspect:摄像机视锥体宽高比
near:摄像机近裁剪面到视点的距离
far:摄像机远裁剪面到视点的距离
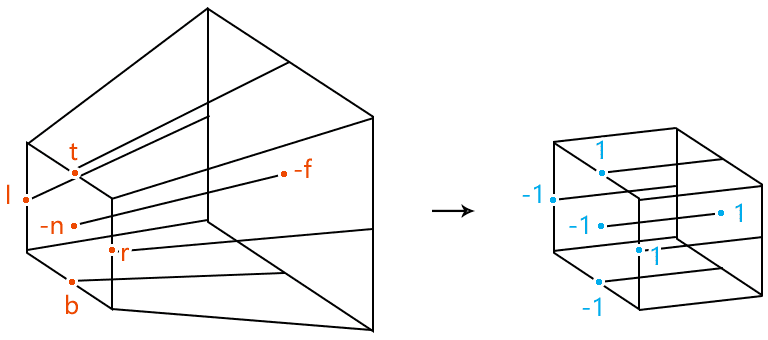
要将一个任意尺寸的正四棱台塞进裁剪空间里,分成2步
从透视到正交。
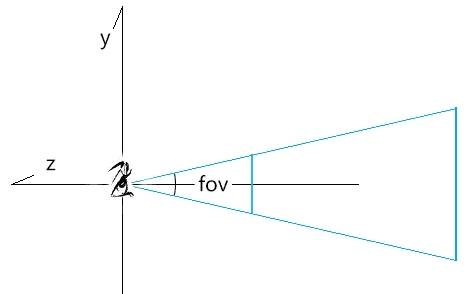
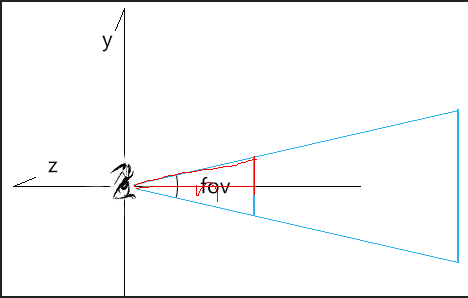
计算透视投影矩阵 基于fov、aspect、n(near)、f(far)计算近裁剪面边界。
1 2 3 4 t=n*tan(fov/2) b=-t r=t*aspect l=-r
解释一下这段代码,根据之前的定义,我们已经知道了
fov:摄像机视锥体垂直视野角度
aspect:摄像机视锥体宽高比
near:摄像机近裁剪面到视点的距离
far:摄像机远裁剪面到视点的距离
那么近裁剪截面对应的y值就是n*tan(fov/2)就很好理解,我们看我画红线的三角形
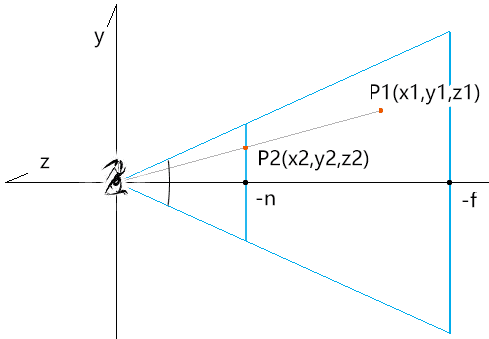
设:可视区域中一顶点为P1(x1,y1,z1) 求:求P1在近裁剪面上的投影P2(x2,y2,z2)
因为:
那么可得
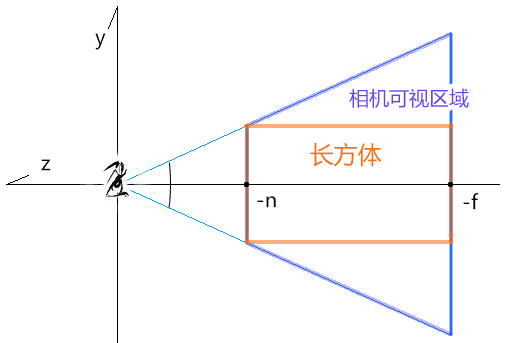
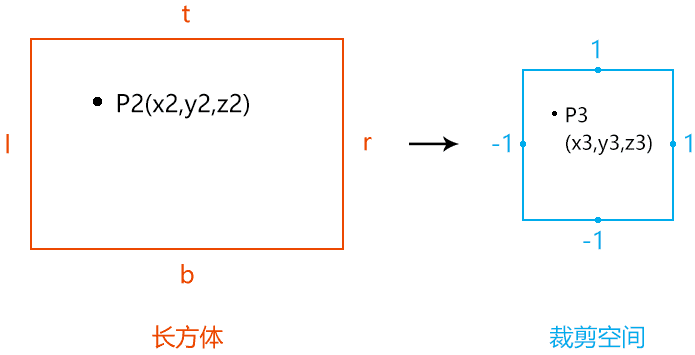
若我们把P1点的x1,y1替换成x2,y2,就可以理解为把相机可视区域塞进了一个长方体里。
把长方体里的顶点塞进裁剪空间中
在x方向可得 1 (x3-(-1))/(1-(-1))=(x2-l)/(r-l)
慢慢演算,可得到
1 x3=2x2/(r-l)-(r+l)/(r-l)
上面结果的具体演算如下:
1 2 3 4 5 6 7 (x3+1)/2=(x2-l)/(r-l) (x3+1)=2(x2-l)/(r-l) x3=2(x2-l)/(r-l)-1 x3=2(x2-l)/(r-l)-(r-l)/(r-l) x3=(2(x2-l)-(r-l))/(r-l) x3=(2x2-(r+l))/(r-l) x3=2x2/(r-l)-(r+l)/(r-l)
然后我们将x2用x1替换掉,x2=nx1/-z1,得到公式
1 x3=(2n/(r-l))x1/-z1-(r+l)/(r-l)
在y方向可得 1 (y3-(-1))/(1-(-1))=(y2-b)/(t-b)
慢慢演算,可得到,或者根据x的结果可以模拟推断结果为(因为结构和上面的x是一样的)
1 y3=2y2/(t-b)-(t+b)/(t-b)
然后我们将y2用y1替换掉,y2=ny1/-z1,得到公式(因为结构和上面一样,所以还是可以类推)
1 y3=(2n/(t-b))y1/-z1-(t+b)/(t-b)
求透视投影矩阵 观察一下当前求出的x3,y3:
1 2 x3=(2n/(r-l))x1/-z1-(r+l)/(r-l) y3=(2n/(t-b))y1/-z1-(t+b)/(t-b)
我们的公式非常的像,此时乘以一个-z1(因为y2=ny1/-z1,x2=nx2/-z1,所以用了-z1,你可以直接将结果带入前面的公式,就可以得到下面的公式),便可以得到一个齐次坐标P4(x4,y4,z4,w4):
1 2 3 4 x4=(2n/(r-l))x1+((r+l)/(r-l))z1 y4=(2n/(t-b))y1+((t+b)/(t-b))z1 z4=? w4=-z1
当前把顶点的z分量投射到裁剪空间中的方法,我们还不知道,所以z4=?
我们可以先从已知条件中提取投影矩阵(行主序)的矩阵因子:
1 2 3 4 5 6 [ 2n/(r-l) 0 (r+l)/(r-l) 0, 0 2n/(t-b) (t+b)/(t-b) 0, ? ? ? ?, 0 0 -1 0 ]
接下来,就剩下z轴相关的矩阵因子了。
因为整个投影矩阵始终是在做线性变换的,投影点的z值与投影矩阵的z轴向的x,y分量无关。
所以投影矩阵的z轴向的x,y分量可以写做0,z和w分量可以设为k,b,如下:
1 2 3 4 5 6 [ 2n/(r-l) 0 (r+l)/(r-l) 0, 0 2n/(t-b) (t+b)/(t-b) 0, 0 0 k b 0 0 -1 0 ]
之前说了,整个投影矩阵始终是在做线性变换,所以我们可以用k,b组合一个斜截式:
当然,你也可以认为是点积的结果:
1 2 z4=(0,0,k,b)·(x1,y1,z1,1) z4=k*z1+b
接下来,我们只要求出上面的k,b,就可以得到透视投影矩阵。
我们可以用当前的已知条件,构建一个二元一次方程组,求出k,b:
1 2 3 4 z4=k*z1+b -1*n=k*-n+b -n=-kn+b b=kn-n
当z1=-f时(远截面),z3=1,z4=1*-z1,即:
1 2 3 4 5 z4=k*z1+b 1*f=k*-f+b f=-kf+b kf=b-f k=(b-f)/f
用消元法求b:
1 2 3 4 5 6 7 8 b=kn-n b=((b-f)/f)n-n b=(b-f)n/f-n fb=(b-f)n-fn fb=bn-fn-fn fb-bn=-2fn b(f-n)=-2fn b=-2fn/(f-n)
再求k:
1 2 3 4 5 6 k=(b-f)/f k=(-2fn/(f-n)-f)/f k=-2n/(f-n)-1 k=(-2n-f+n)/(f-n) k=(-f-n)/(f-n) k=-(f+n)/(f-n)
最终的透视投影矩阵如下:
1 2 3 4 5 6 [ 2n/(r-l) 0 (r+l)/(r-l) 0, 0 2n/(t-b) (t+b)/(t-b) 0, 0 0 -(f+n)/(f-n) -2fn/(f-n), 0 0 -1 0 ]
透视投影的建立方法,我们可以在three.js 的源码里找到。
three.js中的源码 大概如下,three.js 的PerspectiveCamera对象的updateProjectionMatrix() 方法,便是透视相机建立透视投影矩阵的方法。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 updateProjectionMatrix ( const near = this .near ; let top = near * Math .tan ( MathUtils .DEG2RAD * 0.5 * this .fov ) / this .zoom ; let height = 2 * top; let width = this .aspect * height; let left = - 0.5 * width; const view = this .view ; if ( this .view !== null && this .view .enabled ) { const fullWidth = view.fullWidth , fullHeight = view.fullHeight ; left += view.offsetX * width / fullWidth; top -= view.offsetY * height / fullHeight; width *= view.width / fullWidth; height *= view.height / fullHeight; } const skew = this .filmOffset ; if ( skew !== 0 ) left += near * skew / this .getFilmWidth (); this .projectionMatrix .makePerspective ( left, left + width, top, top - height, near, this .far ); this .projectionMatrixInverse .copy ( this .projectionMatrix ).invert (); } makePerspective ( left, right, top, bottom, near, far ) { const te = this .elements ; const x = 2 * near / ( right - left ); const y = 2 * near / ( top - bottom ); const a = ( right + left ) / ( right - left ); const b = ( top + bottom ) / ( top - bottom ); const c = - ( far + near ) / ( far - near ); const d = - 2 * far * near / ( far - near ); te[ 0 ] = x; te[ 4 ] = 0 ; te[ 8 ] = a; te[ 12 ] = 0 ; te[ 1 ] = 0 ; te[ 5 ] = y; te[ 9 ] = b; te[ 13 ] = 0 ; te[ 2 ] = 0 ; te[ 6 ] = 0 ; te[ 10 ] = c; te[ 14 ] = d; te[ 3 ] = 0 ; te[ 7 ] = 0 ; te[ 11 ] = - 1 ; te[ 15 ] = 0 ; return this ; }
透视投影矩阵练习 我们已经计算出来了透视投影矩阵,接下来做个小练习
着色器 1 2 3 4 5 6 7 8 9 10 11 12 13 14 <script id="vertexShader" type="x-shader/x-vertex" > attribute vec4 a_Position; uniform mat4 u_ProjectionMatrix; void main ( gl_Position = u_ProjectionMatrix*a_Position; } </script> <script id ="fragmentShader" type ="x-shader/x-fragment" > precision mediump float; uniform vec4 u_Color; void main ( gl_FragColor=u_Color; } </script >
初始化着色器 1 2 3 4 5 6 7 8 9 10 11 12 13 14 import { initShaders } from '../jsm/Utils.js' ;import { Matrix4 ,PerspectiveCamera , Vector3 , Quaternion , Object3D , OrthographicCamera } from 'https://unpkg.com/three/build/three.module.js' ;import Poly from './jsm/Poly.js' const canvas = document .getElementById ('canvas' );const [viewW, viewH] = [window .innerWidth , window .innerHeight ]canvas.width = viewW; canvas.height = viewH; const gl = canvas.getContext ('webgl' );const vsSource = document .getElementById ('vertexShader' ).innerText ;const fsSource = document .getElementById ('fragmentShader' ).innerText ;initShaders (gl, vsSource, fsSource);gl.clearColor (0.0 , 0.0 , 0.0 , 1.0 );
建立透视相机 1 2 3 4 5 6 7 const [fov,aspect,near,far]=[ 45 , canvas.width / canvas.height , 1 , 20 ] const camera = new PerspectiveCamera (fov,aspect,near,far)
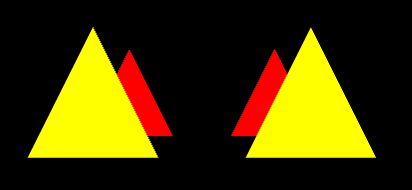
基于相机的透视投影矩阵,绘制4个三角形 前面是两个黄色三角形,后面是两个红色三角形。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 const triangle1 = crtTriangle ( [1 , 0 , 0 , 1 ], [-0.5 ,0 ,-3 ] ) const triangle2 = crtTriangle ( [1 , 0 , 0 , 1 ], [0.5 ,0 ,-3 ] ) const triangle3 = crtTriangle ( [1 , 1 , 0 , 1 ], [-0.5 ,0 ,-2 ] ) const triangle4 = crtTriangle ( [1 , 1 , 0 , 1 ], [0.5 ,0 ,-2 ] ) function crtTriangle (color, [x,y,z] ) { return new Poly ({ gl, source : [ x, 0.3 +y, z, -0.3 +x, -0.3 +y, z, 0.3 +x, -0.3 +y, z, ], type : 'TRIANGLES' , attributes : { a_Position : { size : 3 , index : 0 }, }, uniforms : { u_Color : { type : 'uniform4fv' , value : color }, u_ProjectionMatrix : { type : 'uniformMatrix4fv' , value : camera.projectionMatrix .elements }, } }) } gl.clear (gl.COLOR_BUFFER_BIT ); render ()function render ( gl.clear (gl.COLOR_BUFFER_BIT ); triangle1.init () triangle1.draw () triangle2.init () triangle2.draw () triangle3.init () triangle3.draw () triangle4.init () triangle4.draw () }
结合投影矩阵、视图矩阵、模型矩阵 投影矩阵、视图矩阵、模型矩阵的结合方式:
1 最终的顶点坐标=投影矩阵*视图矩阵*模型矩阵*初始顶点坐标
投影视图矩阵 1.在顶点着色器里把投影矩阵变成投影视图矩阵。
1 2 3 4 5 6 7 <script id="vertexShader" type="x-shader/x-vertex" > attribute vec4 a_Position; uniform mat4 u_PvMatrix; void main ( gl_Position = u_PvMatrix*a_Position; } </script>
2.设置相机位置,并让其看向一点
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 const eye = new Vector3 (0 , 1 , 1 )const target = new Vector3 (0 , 0 , -2.5 )const up = new Vector3 (0 , 1 , 0 )const [fov,aspect,near,far]=[ 45 , canvas.width / canvas.height , 1 , 20 ] const camera = new PerspectiveCamera (fov,aspect,near,far)camera.position .copy (eye) camera.lookAt (target) camera.updateWorldMatrix (true )
3.计算投影视图矩阵,即让相机的投影矩阵乘以视图矩阵
1 2 3 4 5 const pvMatrix = new Matrix4 ()pvMatrix.multiplyMatrices ( camera.projectionMatrix , camera.matrixWorldInverse , )
4.修改一下建立三角形方法里的uniform 变量
1 2 3 4 u_PvMatrix : { type : 'uniformMatrix4fv' , value : pvMatrix.elements },
此时效果如下
投影视图矩阵乘以模型矩阵 之前我们设置三角形位置的时候,是直接对顶点的原始数据进行的修改。
1 2 3 4 5 source: [ x, 0.3 + y, z, -0.3 + x, -0.3 + y, z, 0.3 + x, -0.3 + y, z, ],
其实,我是可以将位移数据写进模型矩阵里的,当然旋转和缩放数据也可以写进去,然后用模型矩阵乘以原始顶点,从而实现对模型的变换。
1.顶点着色器
1 2 3 4 5 6 attribute vec4 a_Position;uniform mat4 u_PvMatrix;uniform mat4 u_ModelMatrix;void main(){ gl_Position = u_PvMatrix*u_ModelMatrix*a_Position; }
2.在crtTriangle()方法里,把三角形的数据源写死,在uniforms 里添加一个模型矩阵。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 function crtTriangle (color, modelMatrix ) { return new Poly ({ gl, modelMatrix, source : [ 0 , 0.3 , 0 , -0.3 , -0.3 , 0 , 0.3 , -0.3 , 0 , ], type : 'TRIANGLES' , attributes : { a_Position : { size : 3 , index : 0 }, }, uniforms : { u_Color : { type : 'uniform4fv' , value : color }, u_PvMatrix : { type : 'uniformMatrix4fv' , value : pvMatrix.elements }, u_ModelMatrix : { type : 'uniformMatrix4fv' , value : modelMatrix }, } }) }
3.建立四个三角形
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 const triangle1 = crtTriangle ( [1 , 0 , 0 , 1 ], [ 1 , 0 , 0 , 0 , 0 , 1 , 0 , 0 , 0 , 0 , 1 , 0 , -0.5 , 0 , -3 , 1 , ] ) const triangle2 = crtTriangle ( [1 , 0 , 0 , 1 ], [ 1 , 0 , 0 , 0 , 0 , 1 , 0 , 0 , 0 , 0 , 1 , 0 , 0.5 , 0 , -3 , 1 , ] ) const triangle3 = crtTriangle ( [1 , 1 , 0 , 1 ], [ 1 , 0 , 0 , 0 , 0 , 1 , 0 , 0 , 0 , 0 , 1 , 0 , -0.5 , 0 , -2 , 1 , ] ) const triangle4 = crtTriangle ( [1 , 1 , 0 , 1 ], [ 1 , 0 , 0 , 0 , 0 , 1 , 0 , 0 , 0 , 0 , 1 , 0 , 0.5 , 0 , -2 , 1 , ] )
结语 本篇文章就到这里了,更多内容敬请期待,债见~